Reading through previous posts on this topic, I realise the general trend of posts have drifted away somewhat from the original subject, but if I may be allowed to continue on the present drift of this topic, I would like to expand somewhat on comments I have made earlier re measured data to 6 decimal places or better.
Pushrod valve train mechanisms are the most difficult to work with owing the the numerous areas where flexibility can occur, thus depriving the action at the valve from following precisely the dictates of the cam. To examine data to 4 places gives a basic indication for the lift curve, the first derivative will be reasonable for velocity, the second derivative is hard pressed to present acelleration in a truly meaningful manner, and the third derivative,jerk, is next to useless. And the problem with this is because jerk gives the best indication of the smoothness of the cam profile progression.
If I take data over consecutive degrees at 4 decimal places, by differentiation I arrive at figures for jerk, but in all probability the figures will all be identical. If the same basic data is now presented in it's original format of 6 decimal places, the differentiation will show meaningful figures for jerk, and the figures will in themselves give an indication of the smoothness of progression of the design. 8 places of decimals gets even better, and now it is possible to go to the 5th derivative, snap, and further examine the progression of the profile.
Examples, for 4 place data, two adjacent jerk figures would be something like -0.0002 and -0.0002
Same data but at 6 places, jerk would be something like -0.000017,-0.000015.
Same data but at 8 places, jerk would be something like -0.00001625, -0.00001536
This concentration on the 4th and 5th derivatives also needs some explanation. In a pushrod engine there is collected evidence to show that jerk can be a limiting factor for valve train control, and the figure generally used is 0.0009 mm/drg^3, or 0.00003543 in/deg^3. Furthermore, this criteria is applicable more to the valve closing side than it is to the opening.
There are Commando cams in circulation that are well within the above jerk reccomendation, but there are also some that aren't, and a notable cam in this latter respect is the PW3.
The fact that a cam is outside the recommended jerk range does not mean it will not be a good performer, in fact with the PW3 it is an excellent performer over a reasonable engine speed range, but if one tries pushing the engine speeds progressively up with the PW3 it will eventually become unstable, and will do so earlier than a cam that has a lower jerk rating. For the record, the PW3 I measured has positive jerk of 0.001268 mm/deg^3 and negative -0.001297 mm/deg^3. This latter negative figure is for that period when the valve has been accellerated to maximum, and is now slowing down as it continues on to peak lift, or on the closing side through the same period. By comparison, the Norris Magnum 70 has jerk values of 0.000572 mm/deg^3 and -0.000559 mm/deg^3, very easy on the valve train (if this is the only consideration - most probably it is not).
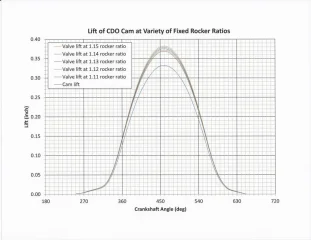
I hope this will explain why it is not possible to examine in any detail overlaid graphs of lift profiles, except for the most basic of reasons. To delve into actual designs, and gain some understanding of what lies behind the design as I hope to have adequately explained, is a whole lot more difficult.
To those who would like to learn more on the subject of cam design and manufacture, I can recommend Camshaft Reference Handbook by Don Hubbard, in all probability the best book yet on the subject, but a copy may be very difficult to obtain.